Manufactura monolítica de mini-robots suaves bioinspirados para locomoción precisa
El objetivo de este proyecto es desarrollar una técnica de manufactura monolítica que permita mejorar la reproducibilidad y precisión funcional en la fabricación de mini-robots suaves bioinspirados tipo crawling, con dimensiones aproximadas de 40 mm de largo por 10 mm de ancho. Actualmente, estos robots se producen mediante técnicas tradicionales de vaciado, las cuales presentan limitaciones importantes, como la generación de flexiones no deseadas durante el movimiento, presencia de burbujas en el material y variaciones geométricas que afectan el desempeño final.
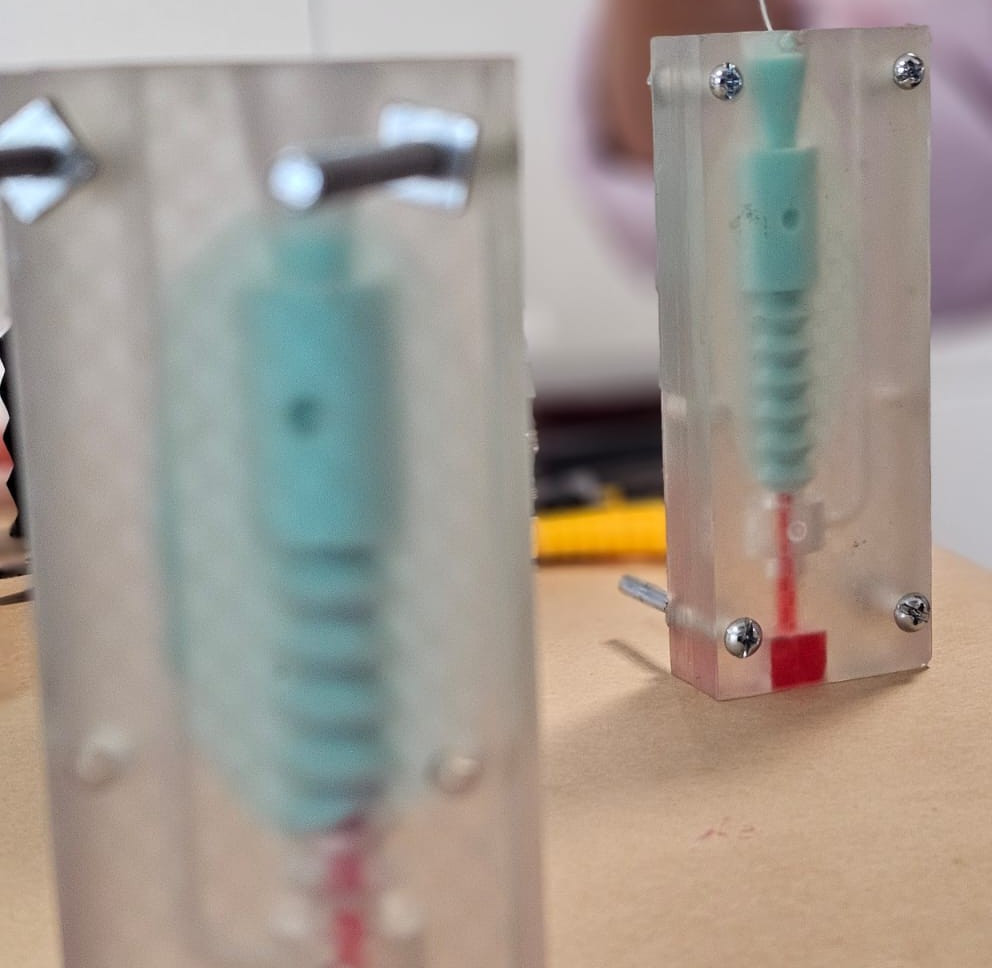
Para superar estos retos, el o la estudiante diseñará moldes altamente complejos que permitan fabricar estructuras suaves de una sola pieza (monolíticas), con geometrías inspiradas en la biología o en técnicas de arte como el origami. El diseño de estos moldes buscará reducir la formación de burbujas durante el vaciado y facilitar el ensamble y desensamble mediante sistemas de rieles de liberación rápida, optimizando así el proceso de manufactura.
Se emplearán tecnologías de impresión 3D por deposición (FDM) y fotopolimerización (SLA) para fabricar los moldes, utilizando materiales resistentes que permitan un uso repetido sin pérdida de precisión. Una vez desarrollada la técnica, se evaluará su efectividad mediante parámetros de desempeño relacionados con la reducción de movimientos no deseados, particularmente el bending no intencionado durante la locomoción.
Este proyecto tiene aplicaciones potenciales en el desarrollo de sistemas robóticos miniaturizados suaves, útiles en exploración, inspección o entornos biomédicos, y representa un aporte importante en metodologías de manufactura reproducibles para robótica blanda.
Revisión de literatura y análisis de técnicas existentes de manufactura monolítica y moldes para mini-robots suaves.
(Semana 1–2)
(Semana 1–2)
Diseño CAD detallado de moldes complejos con geometrías bioinspiradas y sistemas de rieles de desensamble rápido.
(Semana 3–4)
(Semana 3–4)
Fabricación de moldes mediante impresión 3D FDM y SLA, selección de materiales resistentes y ajuste fino del proceso de impresión.
(Semana 5–6)
(Semana 5–6)
Manufactura de prototipos de mini-robots suaves utilizando los moldes desarrollados y aplicación de técnicas de vaciado optimizadas.
(Semana 7–8)
(Semana 7–8)
Evaluación experimental del desempeño (análisis de reducción de bending) y redacción del reporte técnico final documentando el proceso, resultados y recomendaciones.
(Semana 9–10)
(Semana 9–10)
15
Xochitl Yamile Sandoval Castro
yamile.sandoval@tec.mx
Soft Robotics
Soft Crawling Robots
Bio-inspiration
Origami
Casting
Monolitic fabrication
Advanced Manufacturing
3D Printing
FMD
SLA




