Tiny Machine Learning Aplicado a Robótica Móvil
Tiny Machine Learning (Tiny ML) representa una gran revolución en la Inteligencia Artificial y el Aprendizaje Maquinal, ya que lleva la inteligencia a los dispositivos de sistemas embebidos, utilizando algoritmos de redes neuronales compactas.
Tiny ML es un conjunto de arquitecturas, técnicas, herramientas y enfoques de aprendizaje automático que se ejecutan en dispositivos embebidos y que son capaces de realizar análisis complejos de detección, diagnóstico, control y toma de decisiones con fuentes diversas de datos: imágenes, audio, voz, movimiento, series de datos, etc.
Los dispositivos embebidos cuentan con recursos restringidos de energía, capacidad de procesamiento, memoria y comunicación con el exterior, por lo que el diseño de algoritmos eficientes de Tiny ML representa un gran reto.
Este proyecto se enfoca en la evaluación experimental de algoritmos Tiny ML , basados en modelos de vanguardia, tales como redes neuronales convolucionales binarias metaplásticas (RNCBMs) y redes de Kolmogorov-Arnold (KANs).
La plataforma de evaluación a construir incluye pequeños robots móviles, a los cuales hay que equipar con comunicación inalámbrica, una cámara, IMU, encoders y una computadora embebida.
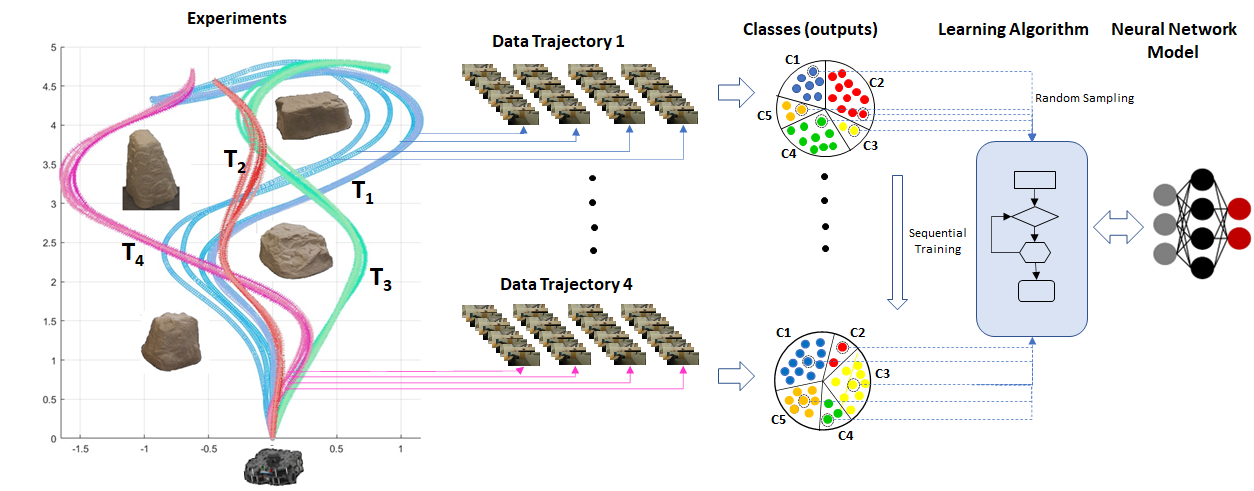
Los experimentos se orientan a la obtención de datos para el entrenamiento de los modelos de redes neuronales y KANs, de tal forma que estos modelos aprendan estrategias eficientes de navegación del robot móvil en entornos estáticos y dinámicos.
1.- Lectura de artículos técnicos relacionados al tema de Tiny Machine Learning.
2.- Equipamiento con cámara, IMU y encoders de 2 pequeños robots móviles y pruebas de validación de lecturas de los sensores y la cámara.
3.- Diseño de la estructura de comunicación Robot-Servidor para la transferencia de datos bidireccional.
4.- Validación de la precisión en la posición del robot en base a los datos de los encoders e IMU.
5.- Estudio y comprensión de los modelos de Tiny ML, desarrollados por estudiantes de posgrado.
6.- Descarga de los modelos en la computadora embebida del robot y pruebas de ejecución.
7.- Diseño de pruebas experimentales y construcción de Base de Datos.
8.- Realización de las pruebas experimentales y validación del contenido de la base de datos.
9.- Entrenamiento de los modelos Tiny ML.
10.- Validación del desempeño de los algoritmos de Tiny ML en experimentos reales.
11.- Documentación del proyecto.
2.- Equipamiento con cámara, IMU y encoders de 2 pequeños robots móviles y pruebas de validación de lecturas de los sensores y la cámara.
3.- Diseño de la estructura de comunicación Robot-Servidor para la transferencia de datos bidireccional.
4.- Validación de la precisión en la posición del robot en base a los datos de los encoders e IMU.
5.- Estudio y comprensión de los modelos de Tiny ML, desarrollados por estudiantes de posgrado.
6.- Descarga de los modelos en la computadora embebida del robot y pruebas de ejecución.
7.- Diseño de pruebas experimentales y construcción de Base de Datos.
8.- Realización de las pruebas experimentales y validación del contenido de la base de datos.
9.- Entrenamiento de los modelos Tiny ML.
10.- Validación del desempeño de los algoritmos de Tiny ML en experimentos reales.
11.- Documentación del proyecto.
8
Luis Eduardo Garza Castañón
legarza@tec.mx
Tiny Machine Learning
Redes de Kolmogorov-Arnold
Robótica Móvil
Navegación de Robots
Sistemas Embebidos




